Schleppkurven-Analyse: Visueller Leitfaden zur Fahrzeuggeometrie

Wenn ein Lkw um eine Ecke fährt, folgen die Hinterräder nicht einfach den Vorderrädern. Sie schneiden die Kurve nach innen. Die Fläche, die das Fahrzeug überstreicht, ist breiter als das Fahrzeug selbst und größer als der Radius eines einzelnen Rades. Die Schleppkurven-Analyse ist das geometrische Werkzeug, mit dem Verkehrsplaner und Ingenieure diese überstrichene Fläche exakt vorhersagen, damit ein Feuerwehrfahrzeug einen Hydranten erreicht, ein Lieferfahrzeug einen Poller passiert und ein Müllfahrzeug aus einer Sackgasse herausfährt, ohne den Bordstein zu überfahren.
Dieser Leitfaden erklärt die Geometrie von Grund auf, führt durch ein vollständig durchgerechnetes Beispiel mit Bleistift und Papier und schließt mit den Effekten, die über das Standardmodell hinausgehen. Es werden keine landesspezifischen Vorschriften vorausgesetzt; die zugrunde liegende Physik gilt überall.
Kurzfassung. In der stationären Kreisfahrt wird die Schleppkurve eines starren Fahrzeugs von genau zwei Referenzpfaden begrenzt: der vorderen Außenecke (Außenkante) und dem inneren Hinterrad (Innenkante: Rad, nicht Karosserieecke). Ein dritter Pfad, die hintere Außenecke, beschreibt den Heckausschlag („tail swing") am Anfang jedes Manövers: ein kurzes Ausschwenken des Hecks nach außen, das vom hinteren Überhang verursacht wird, unabhängig davon, wie schnell der Lenkwinkel aufgebracht wird. Alle drei Pfade lassen sich aus fünf Werten berechnen: Länge, Breite, Radstand, vorderer Überhang, hinterer Überhang. Wir rechnen das unten für einen Standard-Pkw durch.
Was ist eine Schleppkurve?
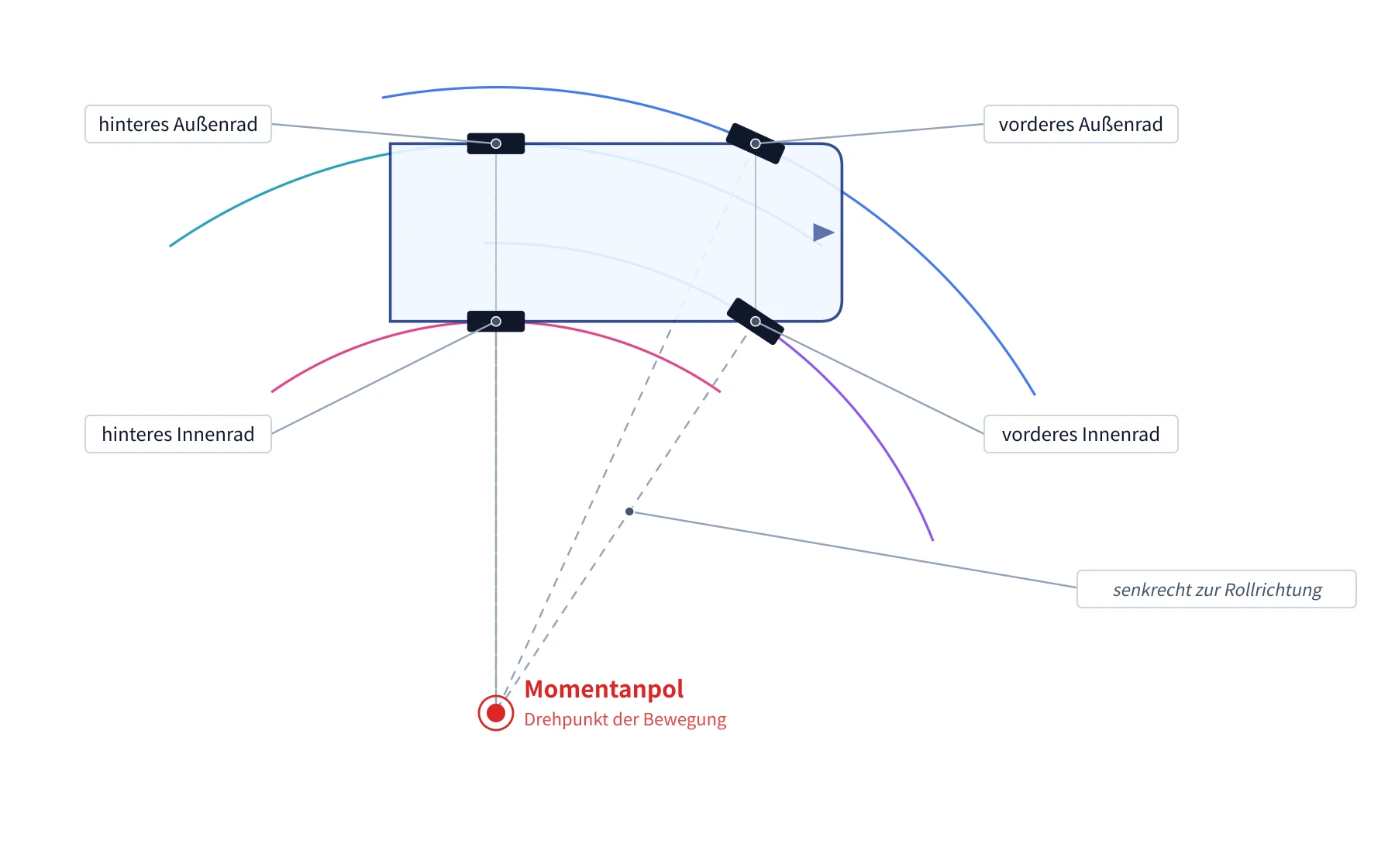
Eine Schleppkurve (auch Schleppkurvennachweis) ist die Fläche, die ein Fahrzeug beim Kurvenfahren physisch belegt. Sie ist die Vereinigung aller Positionen, die der Fahrzeugkörper während des Manövers durchläuft.
Sie wird gebraucht, weil:
- Eine Kreuzung, ein Wendehammer, eine Tiefgaragen-Rampe oder eine Gasse nur so brauchbar ist wie die Fahrzeuge, die hindurchpassen.
- Die geometrische Schleppkurve ist breiter als die reine Fahrzeugbreite, und der Unterschied ist erheblich: ein typischer Lkw belegt in einer engen Kurve etwa die 1,5-fache eigene Breite.
- Ohne die Schleppkurve lässt sich der Abstand zu Bordsteinen, Wänden, Stützen, parkenden Fahrzeugen oder Hydranten nicht prüfen.
Die Geometrie: Ackermann-Lenkung in einfachen Worten
Rudolph Ackermanns Patent von 1817 beschreibt, wie sich die Räder eines gelenkten Fahrzeugs in einer Kurve bewegen. Die zentrale Erkenntnis:
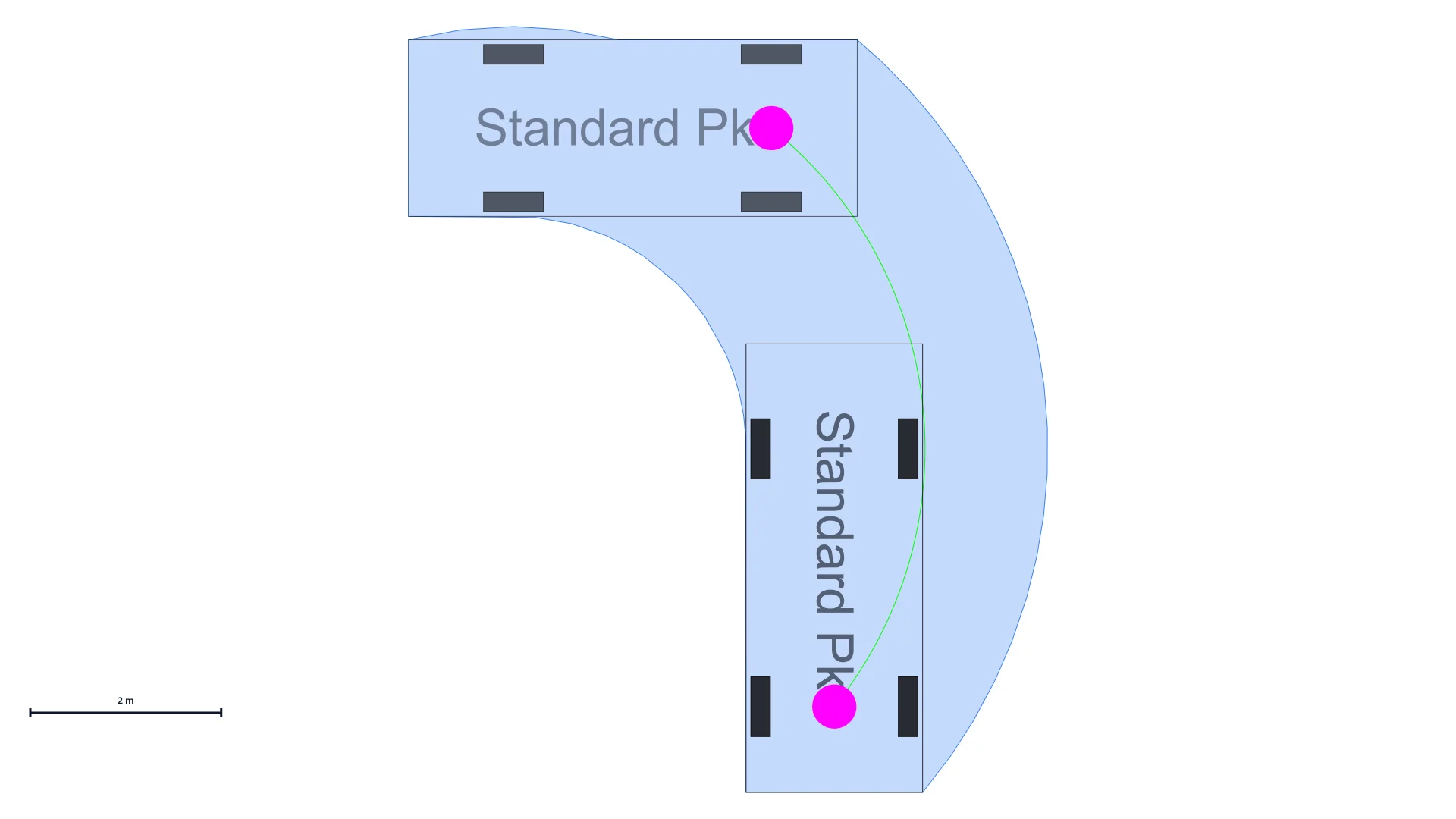
In einer Kurve beschreibt jedes Rad des Fahrzeugs einen Kreis um einen einzigen gemeinsamen Mittelpunkt, den Momentanpol (auch Drehpunkt) der Bewegung.
Der Momentanpol liegt auf der Verlängerung der Hinterachse (weil die nicht gelenkten Hinterräder fest senkrecht zur Achse rollen). Die Vorderräder sind so eingelenkt, dass auch ihre Senkrechten genau durch diesen Pol gehen. Diese Ausrichtung (Vorderräder, die jeweils in leicht unterschiedlichen Winkeln stehen, sodass sich ihre Lote in einem Punkt treffen) nennt man Ackermann-Geometrie.
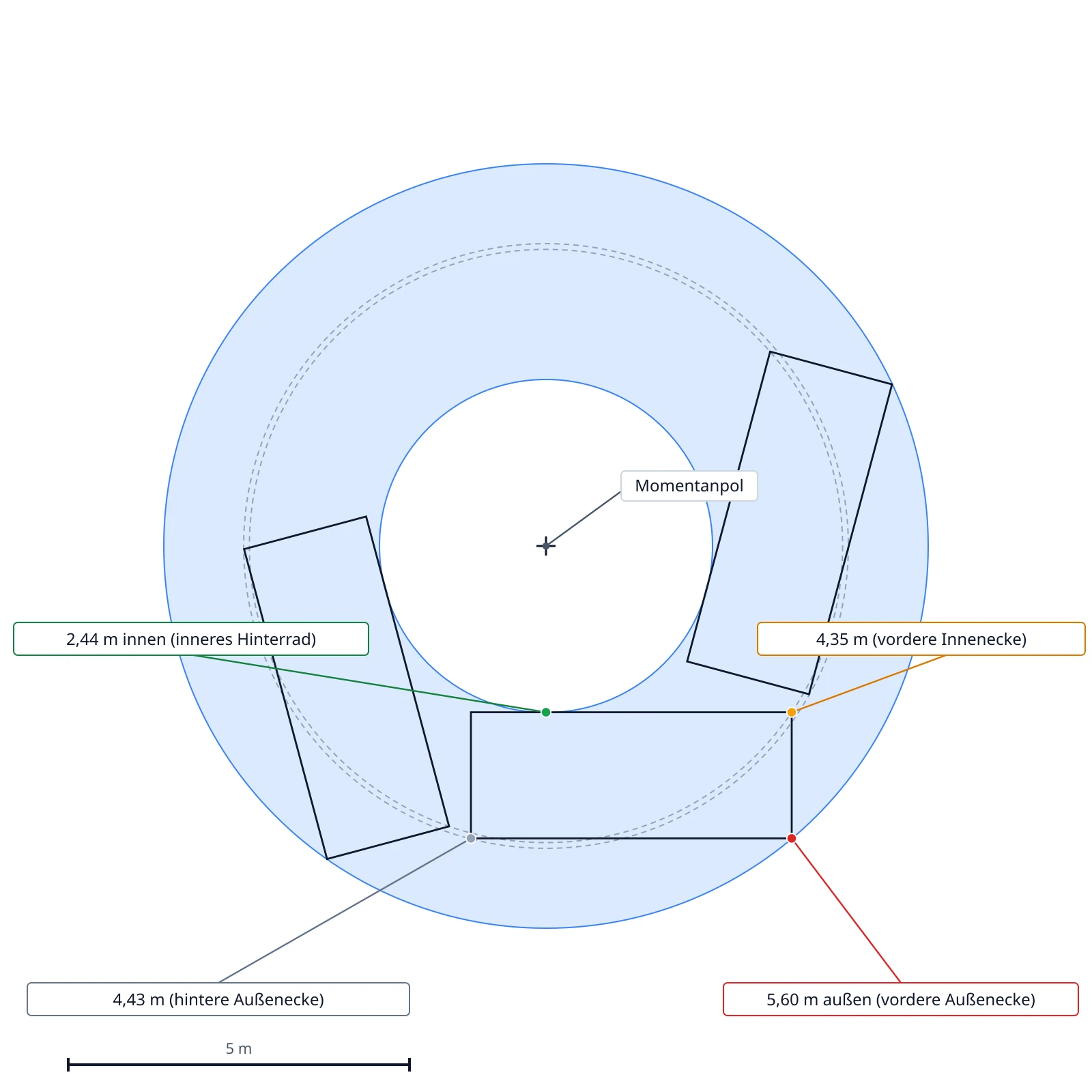
Die Konsequenz: jeder Punkt am Fahrzeug beschreibt einen eigenen Kreis um den Pol. Den größten Kreis beschreibt die vordere Außenecke der Karosserie. Sie liegt durch den vorderen Überhang noch weiter vom Pol entfernt als das äußere Vorderrad und bildet die Außenkante der Schleppkurve. Den kleinsten Kreis beschreibt das innere Hinterrad an der Hinterachse, die Innenkante. Der Fahrzeugkörper überstreicht den ringförmigen Bereich zwischen diesen beiden Pfaden.
Die Mathematik, falls gewünscht. Mit dem Momentanpol auf der Verlängerung der Hinterachse sei R der Abstand vom Pol zum Mittelpunkt der Hinterachse (der Hinterachs-Radius). Dann beträgt der Innen-Hinterrad-Radius R − w/2 und der Außen-Vorderecke-Radius √[(R + w/2)² + (rs + vü)²], wobei w die Fahrzeugbreite, rs der Radstand und vü der vordere Überhang ist. Aus einem dieser Radien folgen alle anderen.
Die Referenzpfade
Drei Referenzpfade decken die Schleppkurve ab. Zwei begrenzen sie in der stationären Phase der Kurvenfahrt; ein dritter, die hintere Außenecke, beschreibt das kurze Ausschwenken des Hecks am Anfang jedes Manövers.
Stationäre Begrenzungen
| Referenz | Was sie nachzeichnet | Funktion |
|---|---|---|
| Vordere Außenecke | Außenecke des vorderen Stoßfängers | Außenkante der Schleppkurve. Maßgebend für Bordsteine, Wände, Laternenmasten auf der Kurvenaußenseite. |
| Inneres Hinterrad | Inneres Hinterrad an der Hinterachse | Innenkante der Schleppkurve. Rad, nicht Karosserieecke; das Rad sitzt innerhalb der Karosserieecke und definiert daher immer die Innenfreigabe. |
In reiner Kreisfahrt beschreiben diese beiden Pfade die Schleppkurve vollständig. Alles andere am Fahrzeugkörper liegt innerhalb des Rings zwischen ihnen.
Heckausschlag
| Referenz | Wann sie zählt |
|---|---|
| Hintere Außenecke | Am Anfang jedes Manövers schwingt das Heck kurz über die ursprüngliche Fahrtrichtung hinaus: der Heckausschlag („tail swing"). Das ist eine geometrische Folge des hinteren Überhangs und tritt unabhängig von der Lenkrate auf; selbst bei sprunghaft aufgebrachtem Lenkwinkel beginnt die hintere Ecke ihre Kreisbahn aus einer Position hinter der Vorderachse, sodass ihre Bahnkurve im Einlenkmoment außerhalb der stationären Schleppkurve liegt. In der stationären Kreisfahrt sitzt die hintere Außenecke dann auf einem kleineren Radius als die vordere Außenecke und liegt innerhalb der Schleppkurve. Der Heckausschlag wird in vielen Vorschriften als eigene Bemessungsprüfung behandelt (z. B. im australischen NHVR-PBS-Standard). |
Der häufigste Fehler, auch in Fachpublikationen, ist die Annahme, dass die innere Hinterkante der Karosserie die Innenkante der Schleppkurve definiert. Tut sie nicht. Die Karosserieecke liegt weiter außen als das Rad, ihr Pfad verläuft also außerhalb des Radpfades. Das Rad, nicht die Karosserieecke, bestimmt die Innenfreigabe.
Die fünf Werte, die Sie brauchen
Für ein nicht gelenkiges Fahrzeug (Pkw, Transporter, zweiachsiger Lkw, Bus) beschreiben fünf Maße die Geometrie einer konstanten Kreisfahrt vollständig:
| Symbol | Name | Beschreibung |
|---|---|---|
| L | Länge | Gesamtlänge, Stoßfänger zu Stoßfänger |
| w | Breite | Gesamtbreite, ggf. inkl. Spiegel |
| rs | Radstand | Abstand Vorder- zu Hinterachse |
| vü | Vorderer Überhang | Vorderkante zur Vorderachse |
| hü | Hinterer Überhang | Hinterachse zur Hinterkante |
Der minimale Wenderadius (kleinster fahrbarer Kreis) ist durch den maximalen Lenkeinschlag der Vorderräder festgelegt, also eine Eigenschaft des Fahrzeugs selbst. Die meisten Hersteller-Datenblätter geben ihn direkt als äußeren Wenderadius (Vorderecken-Radius) oder als Wendekreis von Bordstein zu Bordstein an.
Durchgerechnetes Beispiel: Standard-Pkw
Wir berechnen die vier Referenzpfade eines Standard-Pkw bei seiner engsten Rechtskurve. Die Maße entsprechen ungefähr einem real existierenden VW Golf oder BMW 3er:
| Länge L | 4,70 m |
| Breite w | 1,85 m |
| Radstand rs | 2,70 m |
| Vorderer Überhang vü | 0,90 m |
| Hinterer Überhang hü | 1,10 m |
| Äußerer Wenderadius R_aus | 5,60 m |
Der äußere Wenderadius von 5,60 m ist der Pfad der vorderen Außenecke, gemessen vom Momentanpol. Davon ausgehend rechnen wir rückwärts.
Schritt 1: Hinterachs-Radius
Die vordere Außenecke liegt im Abstand (rs + vü) = 3,60 m vor der Hinterachse und w/2 = 0,925 m außerhalb der Hinterachsmitte. Mit dem Satz des Pythagoras:
R_aus² = (R_HA + w/2)² + (rs + vü)²
5,60² = (R_HA + 0,925)² + 3,60²
31,36 = (R_HA + 0,925)² + 12,96
(R_HA + 0,925)² = 18,40
R_HA + 0,925 = 4,29
R_HA = 3,36 m
Die Hinterachsmitte beschreibt also einen Kreis mit Radius 3,36 m um den Pol.
Schritt 2: Inneres Hinterrad
Das innere Hinterrad liegt eine halbe Fahrzeugbreite innerhalb der Hinterachsmitte:
R_innen_Rad = R_HA − w/2 = 3,36 − 0,925 = 2,44 m
Schritt 3: Hintere Außenecke
Die hintere Außenecke liegt hü = 1,10 m hinter der Hinterachse und w/2 = 0,925 m außerhalb. Ihr Abstand zum Pol:
R_aus_hinten = √[(R_HA + w/2)² + hü²] = √[4,29² + 1,10²] = 4,43 m
Schritt 4: Vordere Innenecke
Die vordere Innenecke liegt (rs + vü) = 3,60 m vor der Hinterachse und w/2 = 0,925 m innen. Ihr Abstand zum Pol:
R_innen_vorne = √[(R_HA − w/2)² + (rs + vü)²] = √[2,44² + 3,60²] = 4,35 m
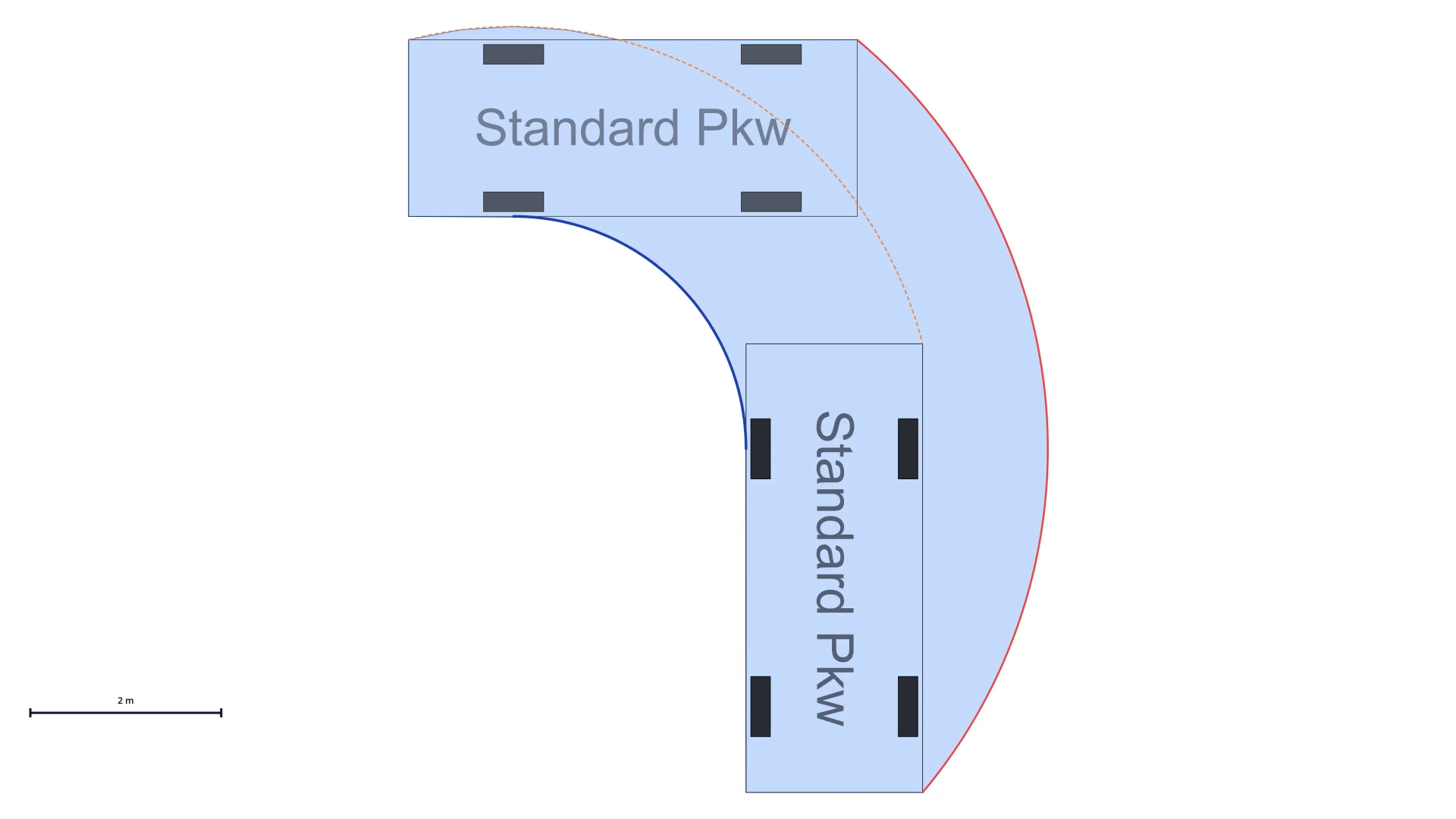
Ergebnis
| Referenz | Radius |
|---|---|
| Vordere Außenecke | 5,60 m ← gegeben |
| Hintere Außenecke | 4,43 m |
| Vordere Innenecke | 4,35 m |
| Inneres Hinterrad | 2,44 m |
Die Schleppkurve ist der ringförmige Bereich zwischen dem Innen-Hinterrad-Kreis (2,44 m) und dem Außen-Vorderecken-Kreis (5,60 m). Für diesen Pkw ist das ein Band mit 3,16 m Breite, etwa das 1,7-fache der eigenen Fahrzeugbreite.
Beachten Sie, dass die hintere Außenecke (4,43 m) und die vordere Innenecke (4,35 m) beide innerhalb dieses Rings liegen, solange sich das Fahrzeug in stationärer Kreisfahrt befindet. Die hintere Außenecke wird am Anfang des Manövers maßgebend (Heckausschlag); die vordere Innenecke bleibt für diese Pkw-Geometrie im gesamten Manöver innerhalb der Schleppkurve.
Warum eine Vollkreis-Annahme? Diese Rechnung liefert die Radien der vollständigen Kreise, die jede Referenz beschreibt. Eine reale Kreuzungs-Kurvenfahrt nutzt typischerweise nur einen Bogen dieser Kreise (der Lenkwinkel wird kurz konstant gehalten und dann wieder herausgenommen). Software verfolgt den tatsächlich gefahrenen Bogen; die hier berechneten Radien zeigen die maximale Auslenkung.
Effekte jenseits des Standardmodells
Das Ackermann-Niedriggeschwindigkeits-Modell ist im Prinzip exakt; reale Fahrzeuge weichen aus drei Gründen davon ab. Die meisten regulatorischen Nachweise ignorieren diese Effekte, weil sie für Niedriggeschwindigkeits-Manöver konstruiert sind. Wo das Modell aber bricht, ist gut zu wissen.
1. Lenkeinschläge sind nicht augenblicklich
Das Modell nimmt an, dass der Lenkwinkel sich sofort einstellt. Tatsächlich dreht der Fahrer das Lenkrad über eine halbe bis zwei Sekunden, und in dieser Zeit ist die tatsächliche Schleppkurve eine Übergangskurve, kein Kreisbogen. Für Pkw auf Planungsmaßstäben ist das vernachlässigbar; die Übergangskurve ist nur im Submillimeter-Bereich sichtbar. Bei langen Gelenkfahrzeugen (Sattelzüge, Lang-Lkw) zählt der Übergang, und Software modelliert ihn dann explizit.
2. Bei höherer Geschwindigkeit läuft die Hinterachse außen
Oberhalb von etwa 30 km/h wird der Reifenschlupf relevant. Die Hinterräder entwickeln einen kleinen Schräglaufwinkel (typisch 1–3°), der das Fahrzeugheck außerhalb seines kinematischen Pfades drückt. Das verbreitert die Außen-Schleppkurve, bei einem Lkw teils um 0,5 m. Für Zufahrten, Parkplätze, Feuerwehrzugänglichkeit und die meisten städtebaulichen Aufgaben ist das Niedriggeschwindigkeits-Modell korrekt. Für Autobahn-Auffahrten, Rennstrecken und Unfallrekonstruktion braucht es ein dynamisches Modell.
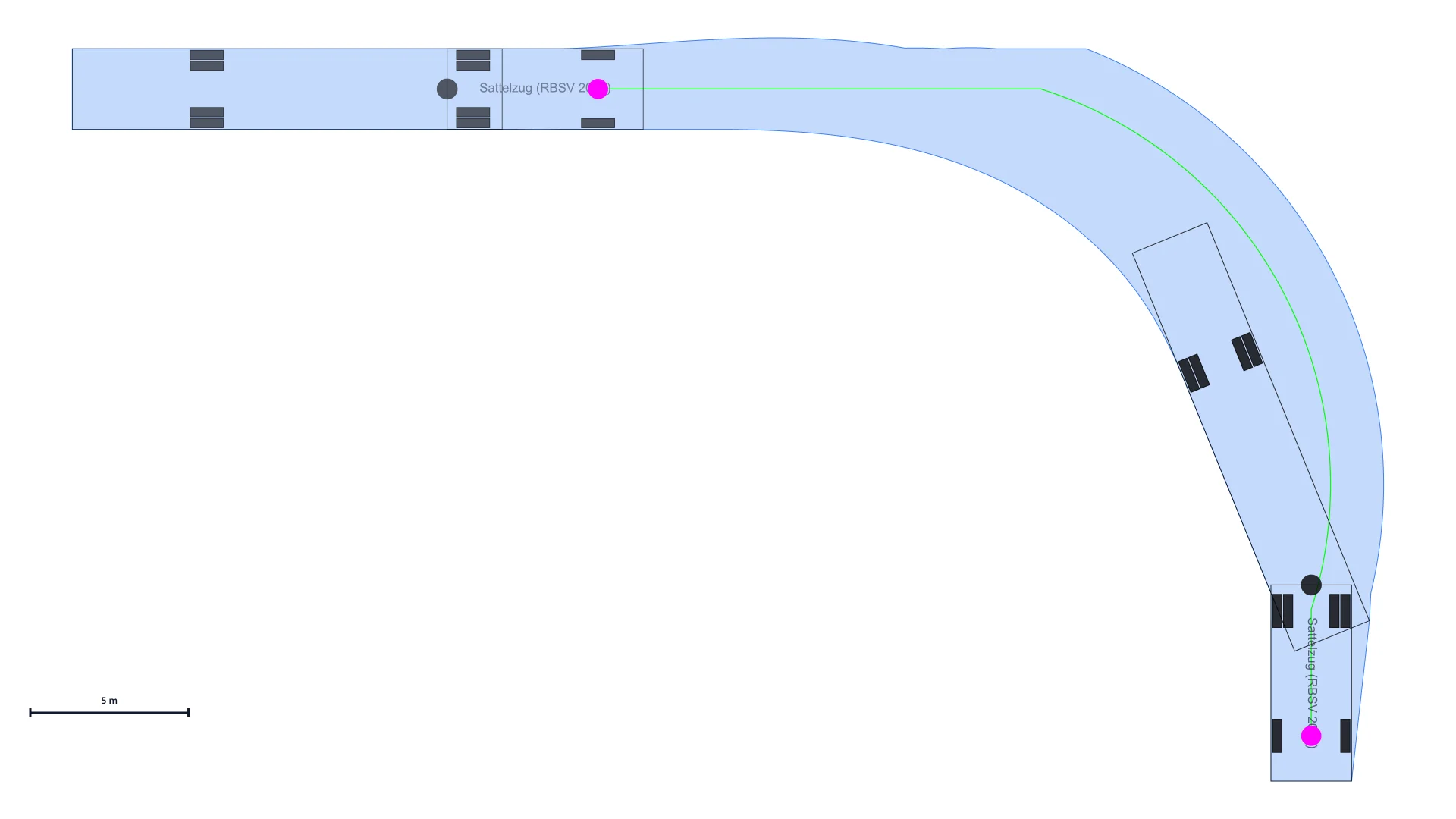
3. Gelenkfahrzeuge erzeugen eine zweite Schleppkurve
Ein Sattelzug ist zwei starre Körper, verbunden durch einen Drehpunkt. Jeder folgt seiner eigenen Ackermann-Geometrie um denselben Pol, doch die Hinterachse des Aufliegers beschreibt einen kleineren Kreis als die der Zugmaschine. Das ist der bekannte Spurversatz langer Lkw: der Auflieger schneidet die Kurve nach innen. Gelenkbusse, B-Trains und Doppel-Anhängerzüge stapeln diesen Effekt; der hinterste Anhänger kann eine enge Kurve um mehrere Meter schneiden.
Bei gelenkten Fahrzeugen kommt eine zweite Feinheit hinzu. Der Trick aus der Starrkörper-Welt, „nur die Karosserieecken nachzeichnen und die Punkte verbinden", liefert nicht mehr die exakte Schleppkurve, weil sich der Drehpunkt (die Sattelplatte) selbst entlang des Pfades der Zugmaschine bewegt, während sich der Auflieger um ihn dreht. In bestimmten Phasen der Kurvenfahrt wird die Innenkante der Auflieger-Schleppkurve nicht von einer Karosserie-Ecke definiert, sondern von einem Punkt entlang der Seite des Aufliegers, typischerweise nahe der Hinterachsgruppe. Produktionswerkzeuge wie AutoTURN, Vehicle Tracking und AutoPATH lösen das, indem sie viele Punkte entlang des gesamten Fahrzeugumfangs in jedem Zeitschritt abtasten und die Vereinigung bilden, statt sich auf vier Ecken zu verlassen. Die Vier-Ecken-Näherung reicht für eine erste Prüfung, kann aber bei engen Kurven die tatsächliche Schleppkurve unterschätzen.
Für solche Fahrzeuge ist Handrechnung unpraktikabel, Software ist im Wesentlichen erforderlich.
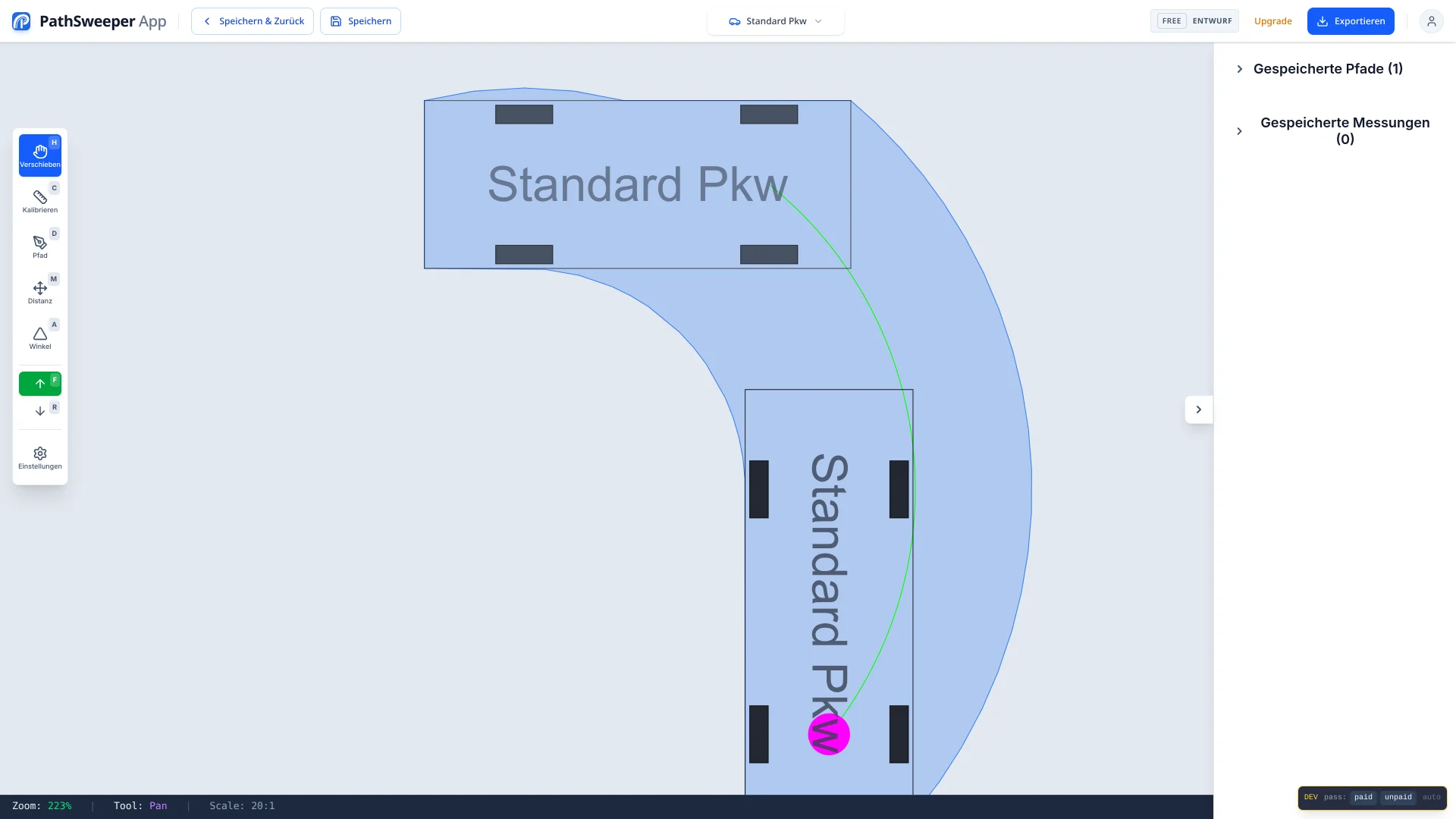
Vom Papier zu PathSweeper
Die obigen Zahlen zeigen, dass selbst ein einzelner Pkw fünf Eingaben und vier ausgegebene Radien benötigt. Eine reale Planungsaufgabe ist selten ein einzelner konstanter Kreis; sie ist eine Folge von Kurven mit unterschiedlichen Radien, eventuell mit Rangiermanövern, gegen einen realen Lageplan mit Bordsteinen, parkenden Fahrzeugen, Stützen und Bäumen. Das alles per Hand zu rechnen ist ein Projekt für sich.
PathSweeper berechnet das alles in Echtzeit beim Zeichnen der Trajektorie über Ihrem Lageplan. Dieselbe zugrunde liegende Geometrie, aber in Sekunden statt einem halben Tag, inklusive Gelenkfahrzeugen, Rangiermanövern und ecken-genauer Freigabe-Auswertung.
Landesspezifische Bemessungsfahrzeuge
Die Geometrie ist universell, aber die Fahrzeuge, gegen die geprüft wird, geben in der Regel nationale oder regionale Vorschriften vor. Jedes Land definiert eine Liste von Bemessungsfahrzeugen mit konkreten Maßen, die für regulatorische Nachweise zu verwenden sind:
- Deutschland: RBSV-2020-Bemessungsfahrzeuge
In jedem dieser Leitfäden steht, was frei nutzbar ist und wo die lizenzierten Veröffentlichungen einzuordnen sind.
PathSweeper läuft im Browser, ohne Installation. Die Demo ist kostenlos; die Vollversion ist in aktiver Entwicklung.